Inverted Pendulum.
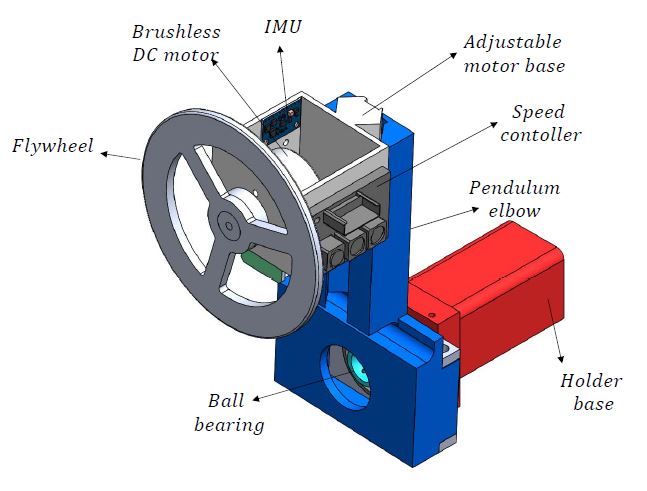
In this project, several control schemes are developed for Flywheel based inverted pendulum. The inertial wheel is used to stabilize the pendulum in the upright position. The pendulum angle and angular velocity are obtained using the Extended Kalman filter and inertial measurement unit (IMU).
Keywords:
Inverted pendulum, states estimation, nonlinear and adaptive control.