Hopping Robot.
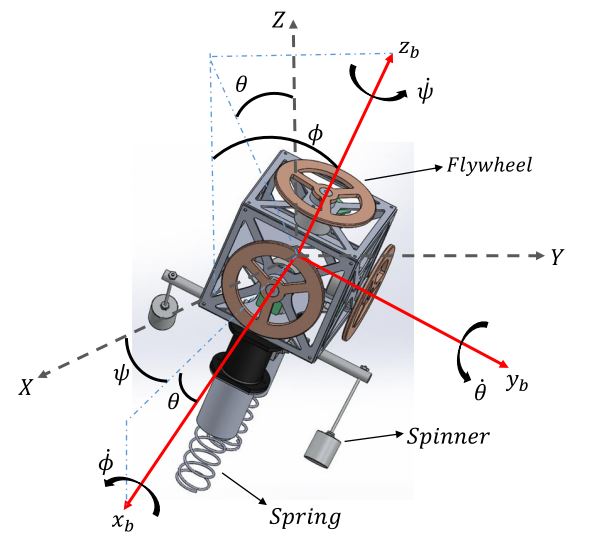
In this project, we introduced a unique hopping robot based on the inertial actuation concept that can navigate in three-dimensional environments. Inertial actuators are used to drive the robot. Rotating mass spinners provide the jumping thrust, while flywheels stabilize and control the orientation of the robot. The robot has two modes of motion: flying and ground contact modes.
Keywords:
Hopping robots, system modeling, navigation, path planning, nonlinear and adaptive control.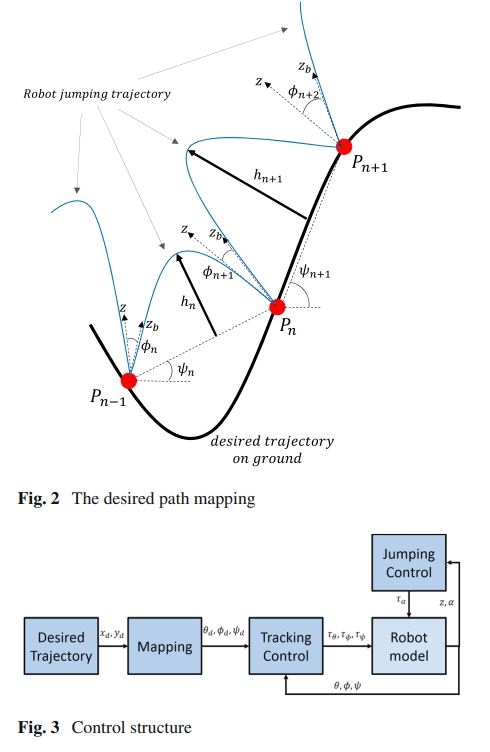
Publication
[1] Razzaghi, P., Al Khatib, E. & Hurmuzlu, Y. Nonlinear dynamics and control of an inertially actuated jumper robot. Nonlinear Dyn 97, 161–176 (2019) doi:10.1007/s11071-019-04963-1