Magnetically Actuated Millirobot.
In this project, A low-cost Magnetic millirobot that is simple in design, easy to fabricate,
highly scalable, and can be used as modular sub-units within
complex structures for large-scale manipulation. Individual millirobots are
highly agile and capable of performing a variety of locomotive
tasks such as pivot walking, tapping, and tumbling.
Magnetic millirobots can be controlled remotely by
external magnetic fields, making them promising candidates for
biomedical and engineering applications.
Keywords:
Millirobots, navigation, locomotion, path planning, design and motion control.Different projects are presented belew:
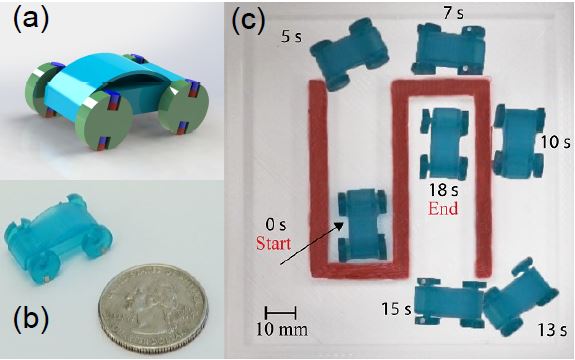
CarBot
BeetleBot
Motion mode: Pivot Walking
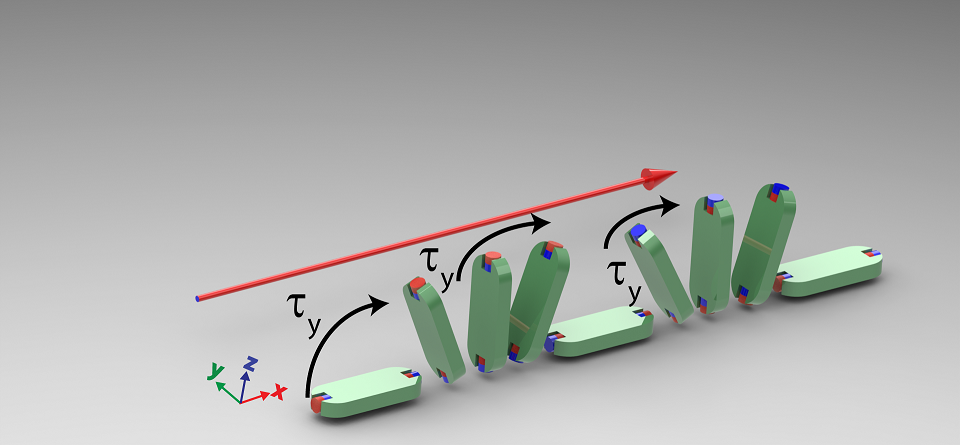
Motion mode: Tumbling
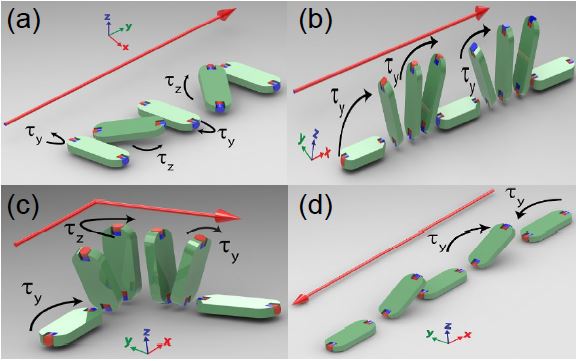
Magnetically Actuated Millirobots: Combined modes
Magnetically Actuated Millirobots: Pivot Walking
Publication
[1] E. Al Khatib, A. Bhattacharjee, P. Razzaghi, L. Rogowski, M. J. Kim and Y. Hurmuzlu, "Magnetically Actuated Simple Millirobots for Complex Navigation and Modular Assembly," in IEEE Robotics and Automation Letters.