Mobile Robots.
The goal of this project is to develop a low-cost approach for
solving the navigation problem of wheeled mobile robots to
perform required tasks within indoor and outdoor environments.
The presented solution is based on probabilistic approaches for
multiple sensor fusion utilizing low-cost visual/inertial sensors.
Keywords:
mobile robots, navigation, localization, path planning, Kalman Filter, SLAM, Microsoft Kinect, nonlinear and adaptive control.Different scenarios are presented belew:
Outdoor navigation
GPS, IMU, and encoders are fused using extended Kalman filter (EKF)
Experimental
Simulation
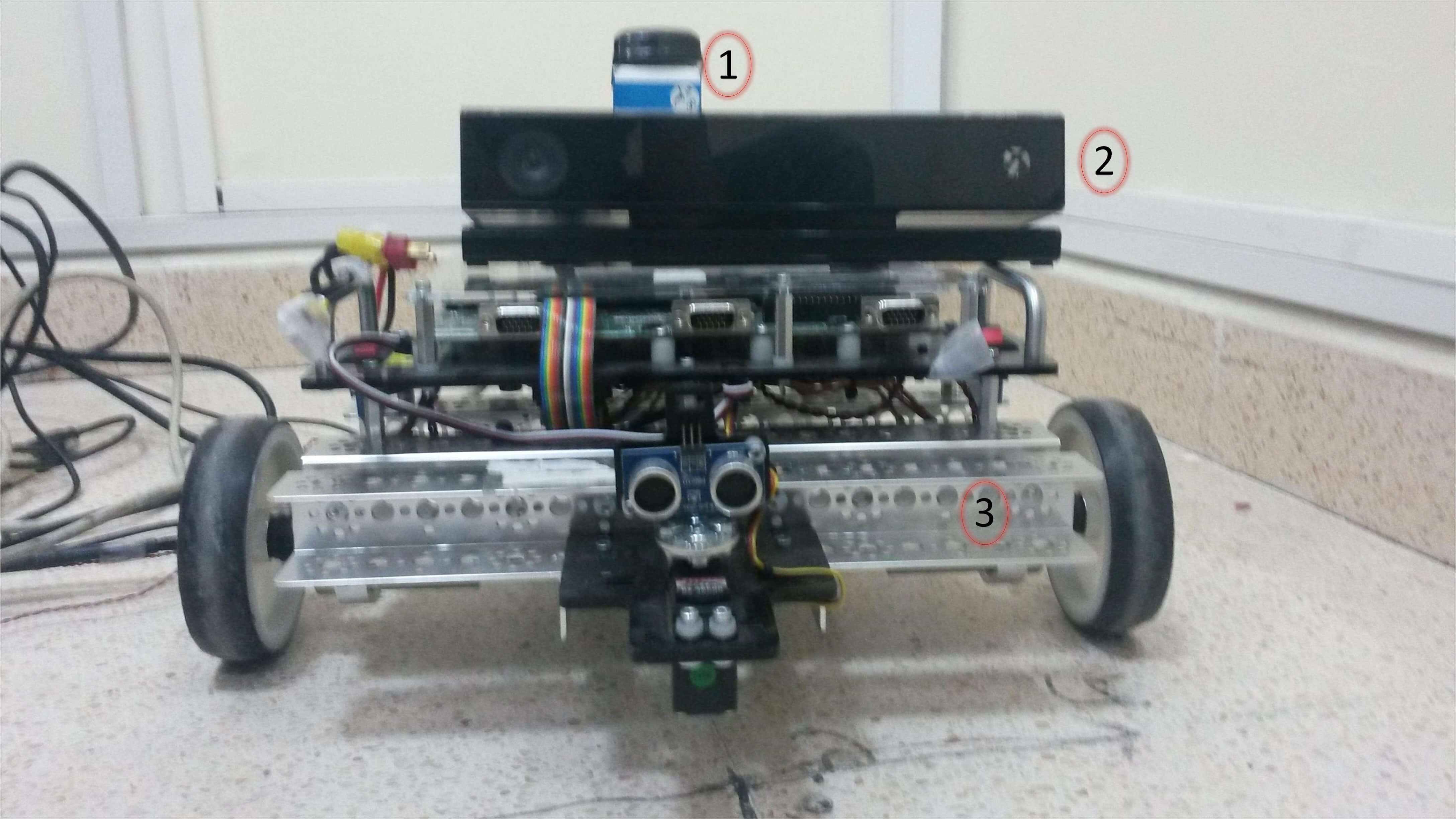
Indoor navigation
Microsoft Kinect, IMU, and encoder are fused using extended Kalman filter (EKF) and Particle Filter
Experimental
Simulation
Simultaneous Localization and Mapping (SLAM)
Microsoft Kinect, IMU, and encoder are fused using extended Kalman filter (EKF)
Experimental
Simulation
Mobile robot contols
different nonlinear controllers are presented
Pose Control for Wheeled Mobile Robot
Trajectory Tracking using IO-SFL for Wheeled Mobile Robot
Publication
[1] E. I. Al Khatib, M. A. Jaradat, M. Abdel-Hafez and M. Roigari, "Multiple sensor fusion for mobile robot localization and navigation using the Extended Kalman Filter," 2015 10th International Symposium on Mechatronics and its Applications (ISMA), Sharjah, 2015, pp. 1-5.
[2] E. I. Al Khatib, W. M. F. Al-Masri, S. Mukhopadhyay, M. A. Jaradat and M. Abdel-Hafez, "A comparison of adaptive trajectory tracking controllers for wheeled mobile robots," 2015 10th International Symposium on Mechatronics and its Applications (ISMA), Sharjah, 2015, pp. 1-6.
[3] E. I. Al Khatib, M. A. K. Jaradat and M. F. Abdel-Hafez, "Low-Cost Reduced Navigation System for Mobile Robot in Indoor/Outdoor Environments," in IEEE Access, vol. 8, pp. 25014-25026, 2020.